CarPuter на базе Raspberry Pi
Наброски мыслей и идей на тему автомобильного компьютеростроения
Тезисы
- Необходима модульная архитектура, чтобы можно было быстро прототипировать, использовать свой мезонин, чтобы добавлять и удалять компоненты как кубики
- Пример:
- сегодня у меня обычный GPS модуль от китайцев за $3, который лишь номинальные функции выполняет
- завтра я захочу апгрейд и куплю модуль за $200 двухдиапазонный GNSS с поддержкой GPS, GLONASS, Galileo и функцией Dear Reconing (навигация в тоннелях и Urban canyon) c дециметровой точностью.
Какие кубики нужны в этой системе?
- Подсистема питания (исполнение SoM/SMD) + изменение тока потребления (можно на серии INA2xx or ZTXxxxx)
- по-хорошему здесь тоже нужна шина CAN
- Подсистема интеграции в авто: CAN, LIN, Speed Sensor, etc
- Дисплейная подсистема (несущая плата (приклеивается на дисплей сзади, обеспечивает все напряжения питания для матрицы + контроллер тача)
Как можно работать с CAN bus на хосте?
- iMX6: есть встроенный контроллер CAN
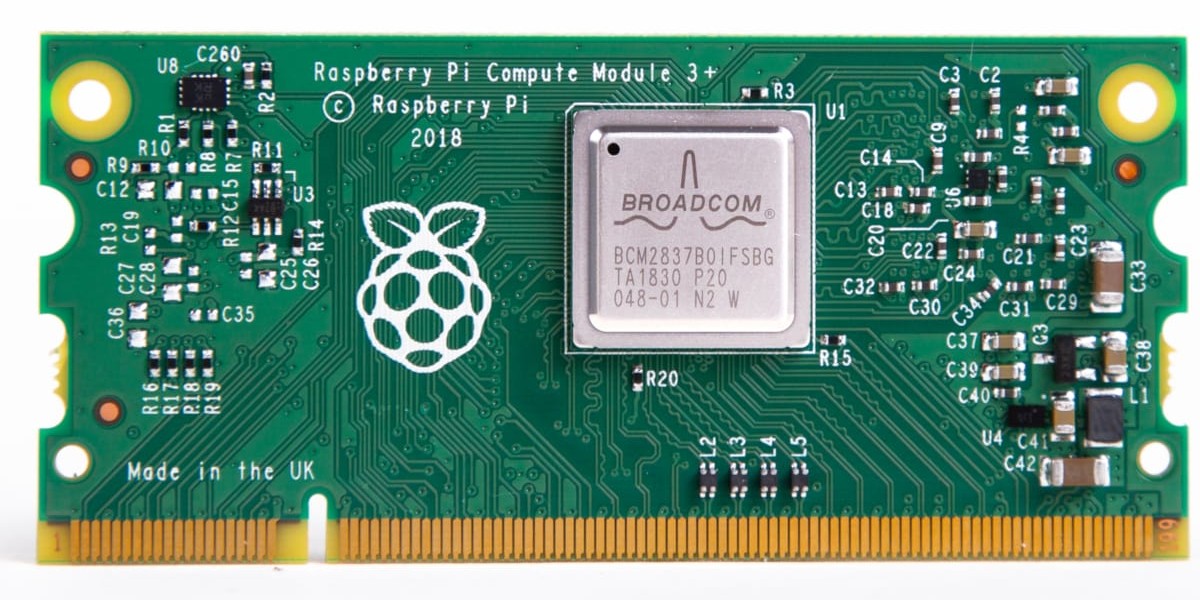
- RPi:
- SPI: MCP2515
- USB: USB-to-CAN (slcan protocol)
- UART: UART-to-CAN (slcan protocol)